Tarot ZYX Gyro 基本設定
今朝は、レトルトカレーにひと味加えて、焼きカレーを作ってみました。



これがまた旨い!
ちょっと混ぜるだけで、かなり変わりますね!
簡単レシビでした・・・爆www
今日は、久しぶりにHeliを弄りましたが、自分のではなく預かりもりです。
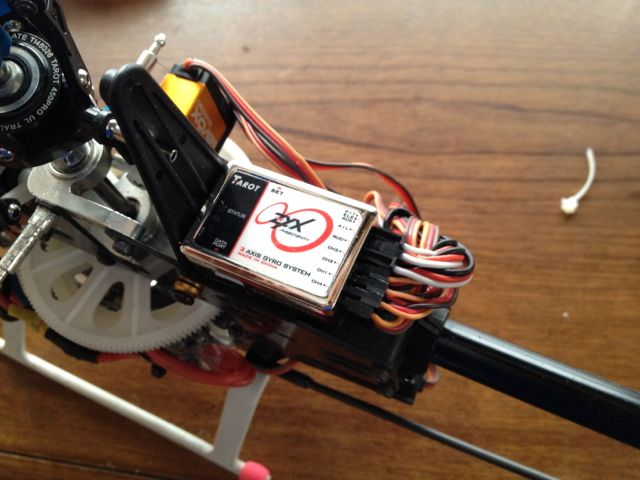
450にTarot ZYXを搭載しました。
取り付けに少々てこずりました・・・汗;
セッティングは、これで・・・
LEDが奇麗・・・・😍
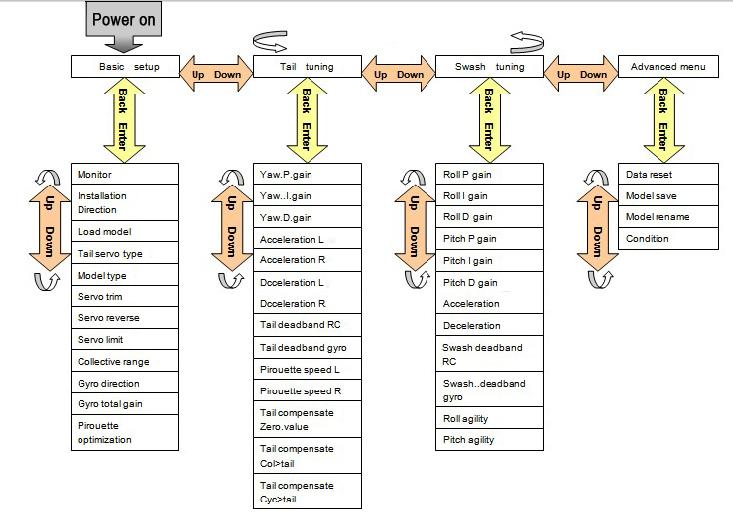
とりあえず基本設定です。
Basic setup (ベーシックセットアップ)
Monitor (モニター)
タロットジャイロと送信機のキャリブレーション
PAGE1 A:0 エルロンch E:0 エレベーターch R:0 ラダーch C:0コレクティブch
PAGE2 G:テールゲイン A:ジャイロMODE AVCS N:ノーマルMODE Condition:
Instal lation (インストール ローテーション)
ジャイロの搭載方法
Direction: 1 (通常)
Direction: 2 (90°横向き)
Direction: 3 (縦置き)
Load model (ロードモデル)
登録モデルの呼び出し
1 ビギナー
2 F3C
3 3Dソフト
4 ハード3D
5 エクストリウム
6
Tail servo type (テールサーボタイプ)
1520us 71Hz : 全サーボ・アナログ
1520us 250Hz : テール1520usサーボデジタル スワッシュ1520usサーボアナログ
1520us 333Hz : テール1520usサーボデジタル スワッシュ1520usサーボデジタル
760us 250Hz : テール760suサーボデジタル スワッシュ1520usサーボアナログ
760us 400Hz : テール760usサーボデジタル スワッシュ1520Hzサーボデジタル
960us 333Hz : テール960usサーボデジタル スワッシュ1520Hzサーボデジタル
Model type (モデルタイプ)
Heli ノーマル
Heli 120
Heli 135
Heli 140
Heli 90
Servo trim (サーボ・トリム)
各サーボのニュートラル(スティクセンター・ピッチ0)
1 エルロン
2 ピッチ
3 エレベーター
4 ラダー
Servo reverse (サーボリバース)
各サーボのリバース
1 エルロン
2 ピッチ
3 エレベーター
4 ラダー
Servo limit (サーボ・リミット)
Tail limit A (テールリミット左)
Tail limit B (テールリミット右)
Aileron limit (エルロンリミット)
Elevator limit (エレベーターリミット)
Collective range (コレクティブピッチ設定)
最大ピッチ角設定
Gyro direction (ジャイロ補正方向設定)
Yaw : ラダー方向
Roll : エルロン方向
Pitch : エレベーター方向
Gyro total gain (ジャイロトータルゲイン)
Yaw total gain ラダー感度
Roll total gain エルロン感度
Pitch total gain エレベーター感度
Pirouette optimization ピルエットオプティマイズ(最適化)
Direction + -
スワッシュプレートが傾きます。
機体を回転させてもスワッシュが同じ向きに傾くのが正しい
なんとか、飛ぶようにセッティングで来ました。
しかし・・・・
飛ばしているうちに、トラッキングが・・・・・
また次回ですね・・・・・
とりあえずフリップはOKでした・・・・・(^o^)/